

 Taking storage tanks out of service results in substantial downtime and associated expenses. These expenses include not only direct activities such as emptying, venting, cleaning, inspection and repair but also significant opportunity costs. Moreover, traditional out-of-service maintenance requires human entry into confined spaces and also resulting in gas emissions and environmental waste. While in-service robotic solutions like RUVI OilDiver effectively address these issues for white-product inspections, applying similar technology to heavy-product environments poses unique challenges due to thick and difficult-to-navigate sludge.
Taking storage tanks out of service results in substantial downtime and associated expenses. These expenses include not only direct activities such as emptying, venting, cleaning, inspection and repair but also significant opportunity costs. Moreover, traditional out-of-service maintenance requires human entry into confined spaces and also resulting in gas emissions and environmental waste. While in-service robotic solutions like RUVI OilDiver effectively address these issues for white-product inspections, applying similar technology to heavy-product environments poses unique challenges due to thick and difficult-to-navigate sludge.
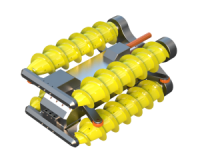
To overcome these challenges, we are developing an innovative Crude Oil Tank Inspection Robot designed to transform crude oil tank inspections by allowing them to be conducted while tanks remain in service. Our objective is to set a new standard in tank integrity assessment, enhance operational efficiency and significantly improve safety in the oil and energy sectors. Our inspection robot integrates advanced design and state-of-the-art sensing capabilities. We have successfully conducted proof-of-concept inspections using crude oil sludge specimens. With the preliminary design and PoC stages completed, we are currently in the process of securing funding to advance this solution.
 Industrial facilities, particularly refineries and power plants, contain numerous confined spaces that are extremely small and challenging to access. Examples include small tubes inside heat exchangers and reformers, narrow piping systems and internal or under-shell areas of equipment. While existing solutions such as videoscopes are available, these devices offer limited maneuverability and accessibility. They also tend to be costly.
Industrial facilities, particularly refineries and power plants, contain numerous confined spaces that are extremely small and challenging to access. Examples include small tubes inside heat exchangers and reformers, narrow piping systems and internal or under-shell areas of equipment. While existing solutions such as videoscopes are available, these devices offer limited maneuverability and accessibility. They also tend to be costly.
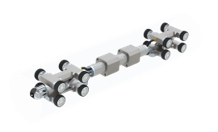
To address this issue, we are developing miniature inspection robots designed specifically to enter hazardous and otherwise inaccessible areas. Our engineering team is currently working on compact robotic solutions tailored to environments such as 4-inch tubes at one of our refinery clients. A miniature robot capable of navigating considerable distances inside these tubes is presently under development, with initial workshop trials already underway. Additional miniature robotic inspection solutions are also being planned for the near future.
 In inspection data analysis, human involvement remains prevalent. This introduces errors due to human limitations and interpreting real-world data can be challenging because of its large volume and high noise levels. Additionally, manual analysis processes are time-consuming and costly. Rule-based software solutions have gained popularity over the past decade, but they are still limited and prone to inaccuracies in dynamic inspection environments. A false indication is one of the most critical issues in any inspection scenario.
In inspection data analysis, human involvement remains prevalent. This introduces errors due to human limitations and interpreting real-world data can be challenging because of its large volume and high noise levels. Additionally, manual analysis processes are time-consuming and costly. Rule-based software solutions have gained popularity over the past decade, but they are still limited and prone to inaccuracies in dynamic inspection environments. A false indication is one of the most critical issues in any inspection scenario.
To address this challenge, the AIS Field engineering team has focused extensively on machine learning (ML) applications over recent years. Benefiting from our background as a spin-off from the NDT service provider Integrity NDT, AIS Field has access to extensive labeled inspection datasets covering techniques such as Eddy Current Testing (ECT) tube inspection, Time-of-Flight Diffraction (TOFD), Phased Array Ultrasonic Testing (PAUT) among others. Through two consecutive projects supported by the Scientific and Technological Research Council of Turkey (TÜBİTAK), we have developed highly effective ML models for automated data analysis. The most successful of these models has been presented academically at the BINDT 2024 conference in the UK, under the title “Development and Comparison of RNN, LSTM, and GRU Neural Network Models for Automated Eddy Current Inspection of Heat Exchanger Tubes Using Real-World Industrial Data.” An abstract of this study is available below, please contact us if you are interested in further details. Our current ML project focuses on integrating these advanced algorithms into robotic data analysis and navigation systems, a task our software team is actively pursuing.
“The field of non-destructive testing (NDT) is crucial for ensuring the safety and reliability of industrial equipment. One of the most widely used methods in NDT is eddy-current testing, which utilizes electromagnetic induction to detect and analyze flaws in conductive materials. Eddy Currents are commonly used in heat exchanger tube inspection, to detect defects such as pitting, corrosion, longitudinal and circumferential cracking, fretting, wall thinning and erosion at tube-support plates. Traditional approaches to analyzing the vast amounts of data collected from eddy current inspections are prone to error, particularly in dynamic environments with changing conditions. To address this challenge, we developed a neural network-based machine learning models for heat exchanger eddy current signal analysis and reporting. Our approach leverages ten years of inspection data collected from 103 different heat exchangers in real-world industrial sites, rather than simulated or laboratory data. 103.000 potential defect areas are extracted using advanced signal processing methods. The AI models are trained on data gathered from both the real and imaginary parts of eddy current signals, as well as features extracted exclusively from these parts. Potential areas are gathered using peaks in the signals and labeled as either “defect” or “not defect”. These data, after certain preprocess steps, are then fed into various models as inputs. Three different neural network architectures (RNN, LSTM and GRU) are used for both ferrous and non-ferrous tubes, where a total of six different models are trained and compared. Our approach simplifies and automates the traditionally lengthy, human-driven and costly data analysis and reporting stages in eddy-current inspections. Specifically, our AI-based digital assistant supports inspectors by streamlining the data analysis process, reducing the potential for human error and providing rapid and accurate results. Our models were tested using brass, stainless steel and carbon steel exchanger tube data collected from refineries and power plants and the most successful models achieved an accuracy of more than 99% in classification. Overall, our approach represents a significant advancement in NDT, offering a more efficient and reliable method for analyzing and reporting eddy-current inspection data. With further development and refinement, our approach has the potential to become a widely used tool in NDT and contribute to the safety and reliability of industrial equipment.”
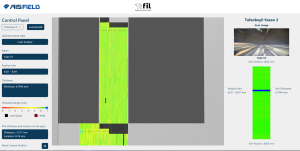 At AIS Field, we have developed a web-based visual inspection management software called Fil, designed to maintain and organize pre-service and in-service inspection records for industrial plant equipment. This software streamlines asset management by clearly identifying each plant element and provides instant data access through a user-friendly graphical interface. Building upon this foundation, we are currently developing Fil3D.
At AIS Field, we have developed a web-based visual inspection management software called Fil, designed to maintain and organize pre-service and in-service inspection records for industrial plant equipment. This software streamlines asset management by clearly identifying each plant element and provides instant data access through a user-friendly graphical interface. Building upon this foundation, we are currently developing Fil3D.
Our robotic inspection systems collect extensive data from assets such as storage tanks and boilers, encompassing not only inspection results but also visual data. Traditional reporting methods, including hard copies and PDFs, are insufficient for capturing the full depth of information and often lead to difficulties in data retrieval and interpretation. To overcome these issues, Fil3D creates digital twins of inspected assets, embedding comprehensive data directly into an intuitive web interface. Customers can securely access their inspection data online, interactively visualize information and derive valuable insights effortlessly. The initial prototype of Fil3D has been completed, with a successful pilot conducted during a boiler inspection in a power plant. The official launch of Fil3D as a commercial product, accompanied by an additional boiler inspection application, is scheduled for the second quarter of 2025.